LANES. erzeugt automatisiert hochgenaue Straßengraphen für Traffic Management und Car2x. Damit wird eine wichtige Datengrundlage für vernetztes und automatisiertes Fahren geschaffen. Das Projekt wird gefördert durch das Österreichische Bundesministerium für Verkehr, Innovation und Technologie (BMVIT) - im Rahmen des Programmschwerpunkts „Mobilität der Zukunft“.
HOCHGENAUE STRASSENGRAPHEN
AUS GNSS-TRAJEKTORIEN.
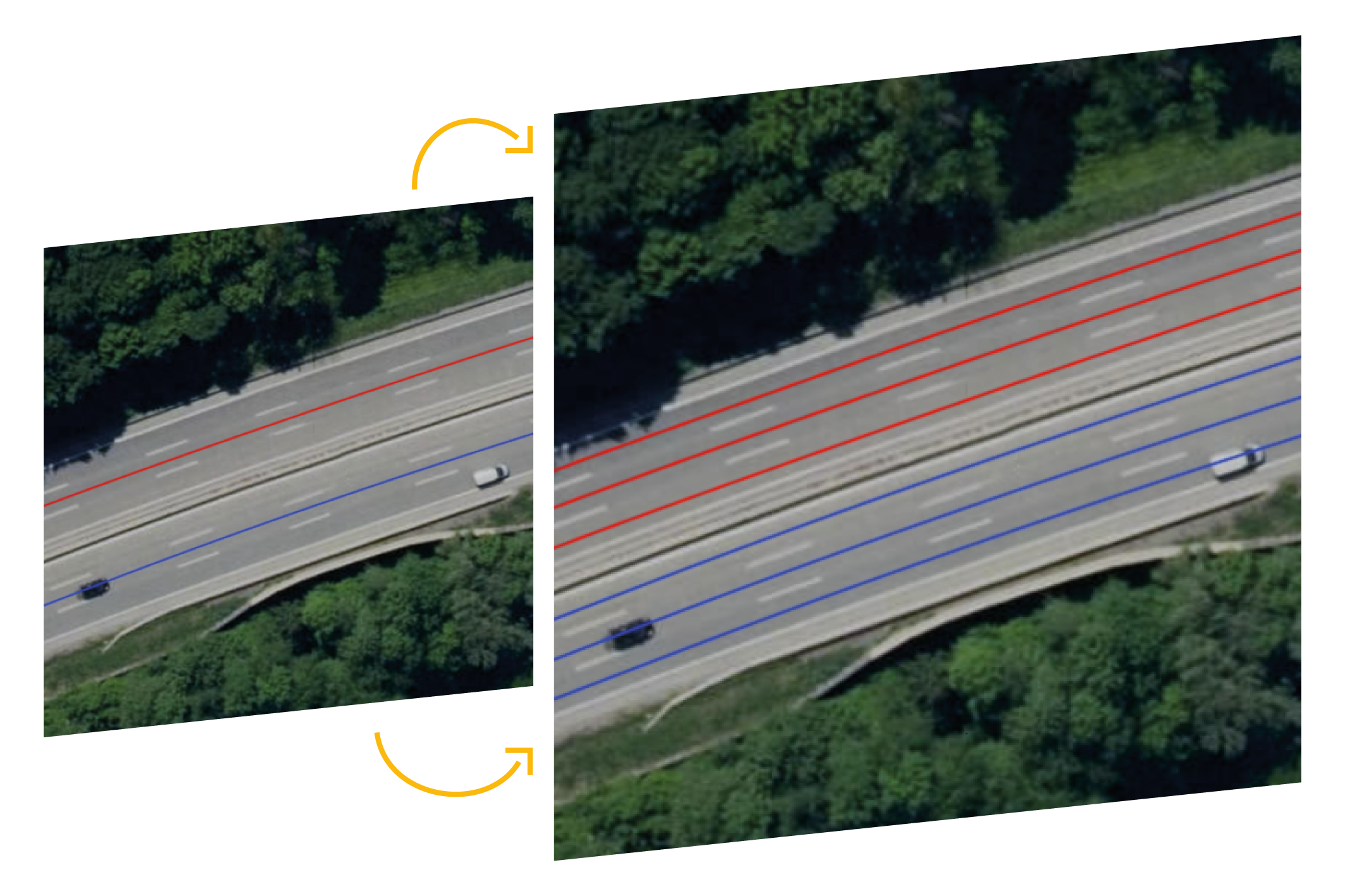
Die exakte Georeferenzierung von spurgenauen Verkehrsinformationen (z. B. Baustellenhinweise und die Sperre von Fahrstreifen) erfordert eine präzise Abbildung der Verkehrsinfrastruktur. Gegenwärtige digitale Straßengraphen sind allerdings nicht genau genug, da Straßenzüge bloß als einzelne Objekte dargestellt werden, unabhängig von der Anzahl der Fahrstreifen.
Aus diesem Grund wurde LANES. kreiert. LANES. leitet fahrstreifenfeine Straßengraphen automatisiert aus Fahrzeugtrajektorien ab. Dafür wurde ein Algorithmus entwickelt, der mit hoher Zuverlässigkeit die Positionen einzelner Fahrstreifenmittelachsen bestimmen kann. Als Eingangsdaten werden Fahrzeugpositionen aus regulären GNSS-Receivern genutzt – wie etwa Smartphones. Damit ist LANES. großflächig einsetzbar und auch besonders kostengünstig.
Aus diesem Grund wurde LANES. kreiert. LANES. leitet fahrstreifenfeine Straßengraphen automatisiert aus Fahrzeugtrajektorien ab. Dafür wurde ein Algorithmus entwickelt, der mit hoher Zuverlässigkeit die Positionen einzelner Fahrstreifenmittelachsen bestimmen kann. Als Eingangsdaten werden Fahrzeugpositionen aus regulären GNSS-Receivern genutzt – wie etwa Smartphones. Damit ist LANES. großflächig einsetzbar und auch besonders kostengünstig.
In gängigen digitalen Straßengraphen sind Straßen durch einzelne Objekte repräsentiert. LANES. erzeugt durch Analyse von Fahrzeugtrajektorien fahrstreifenfeine und hochgenaue Straßengraphen.

